Het ontwerpproces

1. Analyseren en beschrijven
Ontwerp een mechanische grijper die ronde bekers of flesjes (maximale inhoud 0,5 l) en tetrapakken met vierkante doorsnede (maximale inhoud 0,5 l) met en zonder inhoud kan oppakken en op een circa 150 mm hoger en naast gelegen plateau kan neerzetten. De grijper moet worden aangedreven door pneumatische cilinder-actuatoren.
2. Programma van eisen opstellen
Onze eisen en wensen hebben we beoordeeld naar relevantie tussen de 1 en de 5.
Eisen/Wensen

3. (deel)uitwerkingen bedenken
Dit zijn de oplossingen die we gevonden hebben voor de eisen
Oplossingen

4. Ontwerpvoorstel formuleren
Ieder heeft zijn eigen ontwerp gemaakt en deze tekeningen hebben we aan de hand van de eisen beoordeeld en in een tabel gezet. Hierdoor hebben we een goed beeld gekregen hoe onze grijper eruit ging zien en hebben we het beste van ieders grijper gebruikt om onze uiteindelijke grijper te vormen
Beoordeling ontwerpen

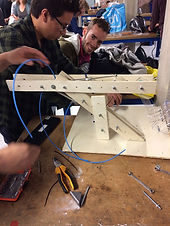
5. Ontwerp realiseren


6. Ontwerp testen en evalueren
Nadat we onze eisen en wensen hebben samengesteld en oplossing hebben gevonden, hebben we de grijpers individueel beoordeeld.
Schematische tekening van de werking van de grijper
Materialen
Voor de grijper zijn betrekkelijk weinig materialen gebruikt, namelijk de volgende vier:
Perspex
Het hoofddeel van de grijper is gemaakt uit perspex. Dit was voornamelijk omdat het voor studenten aan de TU een makkelijk bruikbaar materiaal is, omdat het werd aangeboden vanuit de TU. Het was mogelijk een solidworks-tekening in te sturen van de onderdelen die benodigd waren. Deze werden dan door middel van een lasersnijder uit een plaat gesneden. Het gemak hieraan is dat het een sterk materiaal is en vervolgens makkelijk te assembleren, als het uitgesneden is.
Multiplex
De arm van de grijper is volledig van multiplex gemaakt. Het ideale aan dit materiaal is dat het goedkoop, licht, sterk en makkelijk te bewerken is. Omdat de maten van de arm en hefboomafstanden van tevoren niet helemaal duidelijk waren, is het wel zo handig om een eenvoudig bewerkbaar materiaal is. Perspex was hier bijvoorbeeld geen geschikte keuze geweest, omdat het qua bewerkbaarheid een zeer gevoelig materiaal is.
Staalwol
Het Staalwol component van de grijper is vrij eenvoudig. De grijper heeft vanzelfsprekend grip nodig om het object te kunnen oppakken. Triplex en Perspex zorgden niet voor voldoende grip op het flesje. Om deze grip toch te behalen is besloten een gedeelte van een schuurspons te gebruiken.
Touw
Om kracht uit te oefenen op de hefbomen via de actuatoren, was er een flexibel materiaal nodig dat tegelijkertijd ook veel trekkracht kan weerstaan. We hebben hier voor een stevig soort touw gekozen dat sterk gevlochten is, zodat dit geen problemen zou opleveren tijdens het grijpen van het object.
Wat we verwachtten, en wat er van die verwachtingen is geworden;
De verwachtingen:
-
Van te voren hadden we er vertrouwen in dat ons ontwerp sterk en rigide genoeg zou zijn.
-
We twijfelden of de grijper niet te krachtig zou zijn waardoor objecten zouden kunnen beschadigen.
-
We gingen ervan uit dat de grijper zwaar genoeg zou zijn om zichzelf goed in balans te houden
-
In ons ontwerpproces deden we de aanname dat we mbv ‘’schuursponsjes’’ en scharnierende klemmen genoeg grip en contactoppervlak zouden vormen om objecten te klemmen. En genoeg grijpkracht om het voorwerp omhoog te verplaatsen
-
In het systeem hebben we verstel mogelijkheden aangebracht om de mogelijkheid te hebben om de beweging en grijpkracht te verminderen of te vergroten. Dit hebben we gedaan met behulp van verstelbouten, en afstelling van de hefboom van de grijper.
Na het monteren en testen van de grijper vergelijken we onze gedane verwachtingen en de resultaten.
-
Het ontwerp bleek ontzettend sterk en stevig, er is totaal geen sprake geweest van kritieke zwakke plekken in de grijper
-
Tijdens het testen bleek dat de objecten de kracht van de grijper prima aankonden.
-
De grijper zelf is niet lichtgewicht. Maar omdat de actuator zo heftig uitschuift schommelt de grijper heviger dan gedacht. Dit was tegen onze verwachtingen.
-
Het bleek dat we meer dan genoeg grip en contactoppervlak hadden. De scharnierende klemmen werkten precies zoals verwacht.
-
De uitvoering van het verstellen van de grijpkracht en bewegingsbereik kosten veel tijd. Er waren veel moeren die lastig waren los te maken en te bevestigen.
-
Het touw en katrollen mechanisme van de grijper bleek en zwak punt te zijn. Onder het testen gingen de touwtjes steeds los onder belasting. Ook ging het touwtje steeds van zijn katrol.
Verbeterpunten grijper
Na het testen van de grijper kwamen we achter dat de bewegingen heel schokkerig gingen. Dit zou opgelost kunnen worden door bijvoorbeeld veren te gebruiken en ook actuatoren met remmers erop, zodat het een vloeiende beweging wordt.
Verder nog een betere katrol maken omdat het touw er tijdens het testen elke keer uit schoot. En een betere manier bedenken om de touwen die aan de aparte grijper vingers zitten aan elkaar te koppelen.

